您现在的位置是:首页 » scratch编程资讯
资讯内容
Scratch编程机器人第31课 - 巡线小车
极客小将2020-11-20-
第31课 巡线小车一学习导
第31课 巡线小车 一学习导航
一学习导航
一学习导航
1.了解并安装循迹传感器
2.使用单个循迹传感器制作沿黑线走的小车
二动手实践任务描述:做巡线小车,让机器人沿着黑线行走。
器材准备: dsbot小车、循迹传感器
01硬件搭建搭建车型机器人。将循迹传感器用铜柱装到小车底部,红外管朝下,尽可能往外装,方便调试电位器,并插到控制器P1端口。循线传感器调整和使用请查看第30课定点停车

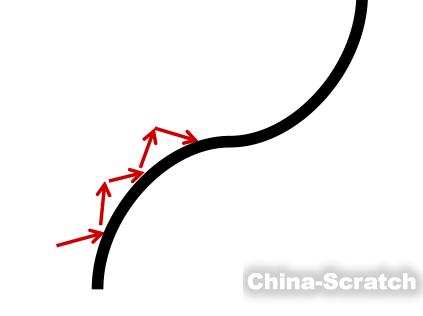
首先先来了解下单个传感器机器人巡线原理。当传感器检测到黑线,小车向左拐,一旦传感器检测到地面时就立刻向右拐,就这样循环重复就可以沿黑线行走了,如下图。
循迹在黑线的值为1,故判断逻辑为“循迹数字=1”,可以调整左右两边的电机功率,让小车又快又稳沿黑线跑。如果小车跑离线时,则要适当调低速度。如果小车稳定沿黑线跑时,也可以适当地调大速度,调整速度直到又快又不跑离线为准。
参考程序:
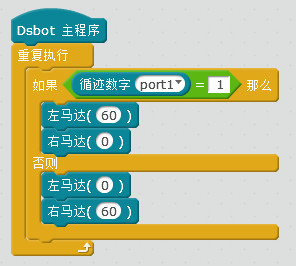
程序编写完成后选中相应的端口和arduino模块,然后点击上传 。当提示上传完成时就可以了,小车能沿着黑线行走,如果有歪曲,也能及时调整,始终保持沿着黑线走。观看效果。
三课外拓展巡线小车巡线小车是一个很好锻炼学生的实验,可以用多个循迹传感器共同巡线,最简单是只用一个即可,首先找一块干净的地面,贴上准备好的黑色电工胶布,转弯的时候尽可能增大转弯半径,在巡线之前,关键一步是调节传感器灵敏度,即把小车的循迹传感器置上黑线上面指示灯灭,置上地板上面,指示灯亮。调整好速度让小车又快又不跑离线。
声明:本文章由网友投稿作为教育分享用途,如有侵权原作者可通过邮件及时和我们联系删除



相关资讯
